Notebook: Memory for Surprise-driven Exploration (Classic Control Ver.) ¶
Reference:
- Burda, Y., Edwards, H., Storkey, A., & Klimov, O. (2018). Exploration by random network distillation. arXiv preprint arXiv:1810.12894.
- Pathak, D., Agrawal, P., Efros, A. A., & Darrell, T. (2017, July). Curiosity-driven exploration by self-supervised prediction. In International conference on machine learning (pp. 2778-2787). PMLR.
- Huang, S., Dossa, R. F. J., Ye, C., Braga, J., Chakraborty, D., Mehta, K., & AraÚjo, J. G. (2022). Cleanrl: High-quality single-file implementations of deep reinforcement learning algorithms. Journal of Machine Learning Research, 23(274), 1-18.
- Brockman, G., Cheung, V., Pettersson, L., Schneider, J., Schulman, J., Tang, J., & Zaremba, W. (2016). Openai gym. arXiv preprint arXiv:1606.01540.
In this notebook we present the implementation of method in the paper "Exploration by random network distillation", which we refer to as RND intrinsic reward, and in the paper "Curiosity-driven exploration by self-supervised prediction", which we refer to as ICM intrinsic reward.
1. Setting up the libraries¶
In [ ]:
# Run these commands from the terminal to install related libraries and set up the working environment
# pip install gym # Install the gym library with RL environments
# pip install envpool
# pip install torch
In [ ]:
import os, random, time
from collections import deque
from dataclasses import dataclass
import pandas as pd
# import gym
import gymnasium as gym
import numpy as np
import torch
import envpool
import torch.nn as nn
from torch.nn import init
import torch.nn.functional as F
import torch.optim as optim
from torch.distributions.categorical import Categorical
from torch.utils.tensorboard import SummaryWriter
from gym.wrappers.normalize import RunningMeanStd
import matplotlib.pyplot as plt
2. CartPole Environment¶
- In this notebook we will use the simple CartPole-v1 environment (https://www.gymlibrary.dev/environments/classic_control/cart_pole/) for demonstration. 🎮
- The goal in this environment is to balance the pole on top of a cart by applying left or right action.
- The observation space is (4,), including cart position, cart velocity, pole angle and pole angular velocity. And, action space is Discrete(2) including action to move left or right. 🔄 You will get a +1 reward for each step the Pole is standing.
- This notebook can also be used for other classic control environments as well. 😊 All you need to do is change the env_id and the state and action space.
3. Simple PPO¶
If you only want to run the surprise motivation, please run until section 3.2.2 to initialize the parameters and PPO.
- In this section, we will test a simple PPO algorithm on the CartPole-v1 environment. 🕹️
- The implementation of PPO in this notebook is inspired by the implementation of PPO from CleanRL package. 📊
- The result of this algorithm will be presented at the end of the notebook. 📝
3.1 Parameters¶
In [ ]:
params = {'env_id': 'CartPole-v1', # env_id can be changed here
'exp_name': "RND",
'torch_deterministic': True,
'cuda': True,
'seed': 1,
'num_envs': 8, # number of multi-environments
'num_steps': 128, # number of steps running in each environments per rollout
'num_minibatches': 4, # number of minibatches
'total_timesteps': 100000, # total training timesteps
'learning_rate': 2.5e-4, # learning_rate
'anneal_lr': True, # reducing learning rate during learning
'num_iterations_obs_norm_init': 50,
'gamma': 0.99,
'int_gamma': 0.99,
'gae_lambda': 0.95,
'int_coef': 1.0,
'ext_coef': 2.0,
'update_epochs': 4,
'update_proportion': 0.25,
'clip_coef': 0.2,
'norm_adv': True,
'clip_vloss': True,
'ent_coef': 0.00,
'vf_coef': 0.5,
'max_grad_norm': 0.5,
'target_kl': None}
state_space = 4 # state space of env
action_space = 2 # action space of env
device = torch.device("cuda" if torch.cuda.is_available() and params["cuda"] else "cpu")
# Set seed.
random.seed(params["seed"])
np.random.seed(params["seed"])
torch.manual_seed(params["seed"])
torch.backends.cudnn.deterministic = params["torch_deterministic"]
3.2 Models¶
3.2.1 Utils¶
In [ ]:
class RecordEpisodeStatistics(gym.Wrapper):
def __init__(self, env, deque_size=100):
super().__init__(env)
self.num_envs = getattr(env, "num_envs", 1)
self.episode_returns = None
self.episode_lengths = None
def reset(self, **kwargs):
observations = super().reset(**kwargs)
self.episode_returns = np.zeros(self.num_envs, dtype=np.float32)
self.episode_lengths = np.zeros(self.num_envs, dtype=np.int32)
self.lives = np.zeros(self.num_envs, dtype=np.int32)
self.returned_episode_returns = np.zeros(self.num_envs, dtype=np.float32)
self.returned_episode_lengths = np.zeros(self.num_envs, dtype=np.int32)
return observations
def step(self, action):
observations, rewards, dones, _, infos = super().step(action)
self.episode_returns += infos["reward"]
self.episode_lengths += 1
self.returned_episode_returns[:] = self.episode_returns
self.returned_episode_lengths[:] = self.episode_lengths
self.episode_returns *= 1 - infos["terminated"]
self.episode_lengths *= 1 - infos["terminated"]
infos["r"] = self.returned_episode_returns
infos["l"] = self.returned_episode_lengths
return (observations, rewards, dones, infos)
In [ ]:
def layer_init(layer, std=np.sqrt(2), bias_const=0.0):
torch.nn.init.orthogonal_(layer.weight, std) # Initialize layer weights according to orthogonal method.
torch.nn.init.constant_(layer.bias, bias_const) # Set the bias of the layer.
return layer
In [ ]:
def make_env(env_id):
def thunk():
env = gym.make(env_id)
env = gym.wrappers.RecordEpisodeStatistics(env)
return env
return thunk
In [ ]:
def evaluate(env_id, agent, use_int_rews):
env = gym.make(env_id)
sum_result = 0
for _ in range(50):
ob, _ = env.reset()
while True:
if use_int_rews:
action, _, _, _, _ = agent.get_action_and_value(torch.Tensor(ob).to(device))
else:
action, _, _, _ = agent.get_action_and_value(torch.Tensor(ob).to(device))
next_ob, reward, terminated, truncated, info = env.step(action.cpu().numpy())
sum_result += reward
done = np.logical_or(terminated, truncated)
if done:
break
ob = next_ob
return sum_result/10
3.2.2 PPO Agent¶
In [ ]:
class PPOAgent(nn.Module):
def __init__(self, envs, use_int_rews=False):
super().__init__()
self.use_int_rews = use_int_rews
# print(envs.single_observation_space.shape)
self.critic_ext = nn.Sequential(
layer_init(nn.Linear(state_space, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 1), std=1.0),
)
self.critic_int = nn.Sequential(
layer_init(nn.Linear(state_space, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 1), std=1.0),
)
self.actor = nn.Sequential(
layer_init(nn.Linear(state_space, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, action_space), std=0.01),
)
def get_action_and_value(self, x, action=None):
logits = self.actor(x)
probs = Categorical(logits=logits)
if action is None:
action = probs.sample()
if self.use_int_rews: # If intrinsic reward is used
return (action, probs.log_prob(action), probs.entropy(), self.critic_ext(x), self.critic_int(x),)
else: # If intrinsic reward is not used
return (action, probs.log_prob(action), probs.entropy(), self.critic_ext(x),)
def get_value(self, x):
if self.use_int_rews: # If intrinsic reward is used
return self.critic_ext(x), self.critic_int(x)
else: # If intrinsic reward is not used
return self.critic_ext(x)
3.2.3 Main Training Loop¶
In [ ]:
env_id = params["env_id"]
exp_name = params["exp_name"]
seed = params["seed"]
run_name = f"{env_id}__{exp_name}__{seed}__{int(time.time())}"
envs = gym.vector.SyncVectorEnv(
[make_env(env_id) for i in range(params["num_envs"])],
)
In [ ]:
# Set up agent and model
Agent = PPOAgent(envs, use_int_rews=False).to(device)
optimizer = optim.Adam(
Agent.parameters(),
lr=params["learning_rate"],
eps=1e-5,
)
In [ ]:
obs = torch.zeros((params["num_steps"], params["num_envs"]) + envs.single_observation_space.shape).to(device)
actions = torch.zeros((params["num_steps"], params["num_envs"]) + envs.single_action_space.shape).to(device)
logprobs = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
rewards = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
dones = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
values = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
avg_returns = deque(maxlen=20)
In [ ]:
batch_size = int(params["num_envs"] * params["num_steps"])
minibatch_size = int(batch_size // params["num_minibatches"])
num_iterations = params["total_timesteps"] // batch_size
global_step = 0
start_time = time.time()
next_obs = torch.Tensor(envs.reset()[0]).to(device)
next_done = torch.zeros(params["num_envs"]).to(device)
results_simple_PPO = {"global_step":[],
"return_value":[]}
tracking_global_step = 0
for iteration in range(1, num_iterations+1):
if params["anneal_lr"]:
updated_lr = (1.0 - (iteration - 1.0) / num_iterations) * params["learning_rate"]
optimizer.param_groups[0]["lr"] = updated_lr
for step in range(0, params["num_steps"]):
global_step += 1 * params["num_envs"]
obs[step] = next_obs
dones[step] = next_done
with torch.no_grad():
action, logprob, _, value = Agent.get_action_and_value(next_obs)
values[step] = value.flatten()
actions[step] = action
logprobs[step] = logprob
next_obs, reward, terminated, truncated, info = envs.step(action.cpu().numpy())
done = np.logical_or(terminated, truncated)
rewards[step] = torch.tensor(reward).to(device).view(-1)
next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
if "final_info" in info:
for info in info["final_info"]:
if info and "episode" in info:
print(
f"global_step={global_step}, episodic_return={info['episode']['r'][0]}"
)
if global_step - tracking_global_step > 2000:
return_eval = evaluate(params["env_id"], Agent, use_int_rews=False)
results_simple_PPO["global_step"].append(global_step)
results_simple_PPO["return_value"].append(return_eval)
tracking_global_step = global_step
# bootstrap value if not done
with torch.no_grad():
next_value = Agent.get_value(next_obs).reshape(1, -1)
advantages = torch.zeros_like(rewards).to(device)
lastgaelam = 0
for t in reversed(range(params["num_steps"])):
if t == params["num_steps"] - 1:
nextnonterminal = 1.0 - next_done
nextvalues = next_value
else:
nextnonterminal = 1.0 - dones[t + 1]
nextvalues = values[t + 1]
delta = rewards[t] + params["gamma"] * nextvalues * nextnonterminal - values[t]
advantages[t] = lastgaelam = delta + params["gamma"] * params["gae_lambda"] * nextnonterminal * lastgaelam
returns = advantages + values
# flatten the batch
b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
b_logprobs = logprobs.reshape(-1)
b_actions = actions.reshape((-1,) + envs.single_action_space.shape)
b_advantages = advantages.reshape(-1)
b_returns = returns.reshape(-1)
b_values = values.reshape(-1)
# Optimizing the policy and value network
b_inds = np.arange(batch_size)
clipfracs = []
for epoch in range(params["update_epochs"]):
np.random.shuffle(b_inds)
for start in range(0, batch_size, minibatch_size):
end = start + minibatch_size
mb_inds = b_inds[start:end]
_, newlogprob, entropy, newvalue = Agent.get_action_and_value(b_obs[mb_inds], b_actions.long()[mb_inds])
logratio = newlogprob - b_logprobs[mb_inds]
ratio = logratio.exp()
with torch.no_grad():
# calculate approx_kl http://joschu.net/blog/kl-approx.html
old_approx_kl = (-logratio).mean()
approx_kl = ((ratio - 1) - logratio).mean()
clipfracs += [((ratio - 1.0).abs() > params["clip_coef"]).float().mean().item()]
mb_advantages = b_advantages[mb_inds]
if params["norm_adv"]:
mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
# Policy loss
pg_loss1 = -mb_advantages * ratio
pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - params["clip_coef"], 1 + params["clip_coef"])
pg_loss = torch.max(pg_loss1, pg_loss2).mean()
# Value loss
newvalue = newvalue.view(-1)
if params["clip_vloss"]:
value_loss_unclipped = (newvalue - b_returns[mb_inds]) ** 2
v_clipped = b_values[mb_inds] + torch.clamp(
newvalue - b_values[mb_inds],
-params["clip_coef"],
params["clip_coef"],
)
value_loss_clipped = (v_clipped - b_returns[mb_inds]) ** 2
value_loss_max = torch.max(value_loss_unclipped, value_loss_clipped)
value_loss = 0.5 * value_loss_max.mean()
else:
value_loss = 0.5 * ((newvalue - b_returns[mb_inds]) ** 2).mean()
entropy_loss = entropy.mean()
loss = pg_loss - params["ent_coef"] * entropy_loss + value_loss * params["vf_coef"]
optimizer.zero_grad()
loss.backward()
nn.utils.clip_grad_norm_(Agent.parameters(), params["max_grad_norm"])
optimizer.step()
if params["target_kl"] is not None and approx_kl > params["target_kl"]:
break
y_pred, y_true = b_values.cpu().numpy(), b_returns.cpu().numpy()
var_y = np.var(y_true)
explained_var = np.nan if var_y == 0 else 1 - np.var(y_true - y_pred) / var_y
print("SPS:", int(global_step / (time.time() - start_time)))
In [ ]:
envs.close()
In [ ]:
# torch.save(Agent, "pretrained_models/simple_ppo_for_suprised.pth")
In [ ]:
# Load the saved PPO agent
# agent = torch.load("pretrained_models/simple_ppo_for_suprised.pth")
In [ ]:
# Extract data from results_simple_PPO
ppo_global_step = results_simple_PPO["global_step"]
ppo_return_value = results_simple_PPO["return_value"]
df_ppo = pd.DataFrame({'global_step': ppo_global_step, 'return_value': ppo_return_value})
df_ppo.to_csv('./data/results_simple_ppo.csv', index=False)
4. Random Network Distillation¶
- In this section, we will test the Random Network Distillation algorithm on the CartPole-v1 environment. 🕹️
- The result of this algorithm will be presented at the end of the notebook. 📝
4.1 Key Points¶
- Prediction problem is randomly generated. This involves 2 NNs, fixed target network sets the prediction problem (find an embedding $f(O)$ for an observation) and predictor network trained on data collected (with the task to predict $\hat{f}(O)$) from the agent, minimizing MSE Loss $\text{MSE} = \| \hat{f}(x; \theta) - f(x) \|^{2}_2$.
- Prediction error is expected to be higher in novel state (suprise state) that the agent is not familiar with.
- $R=R_E+R_I$, thus, $V=V_E+V_I$.
- Reward and Observation Normalization.
4.2 Models¶
4.2.1 RND Models¶
In [ ]:
class RNDModel(nn.Module):
def __init__(self):
super().__init__()
# Prediction network
self.predictor = nn.Sequential(
layer_init(nn.Linear(state_space, 256)),
nn.ReLU(),
layer_init(nn.Linear(256, 256)),
nn.ReLU(),
layer_init(nn.Linear(256, 256), std=1.0),
)
# Target network
self.target = nn.Sequential(
layer_init(nn.Linear(state_space, 256)),
nn.ReLU(),
layer_init(nn.Linear(256, 256)),
nn.ReLU(),
layer_init(nn.Linear(256, 256), std=1.0),)
# fixed the target network params
for param in self.target.parameters():
param.requires_grad = False
def forward(self, next_obs):
target_feature = self.target(next_obs)
predict_feature = self.predictor(next_obs)
return predict_feature, target_feature
In [ ]:
class MovingSumOfReward:
def __init__(self, gamma):
self.moving_sum_of_reward = None
self.gamma = gamma
def update(self, rews):
if self.moving_sum_of_reward is None:
self.moving_sum_of_reward = rews
else:
self.moving_sum_of_reward = self.moving_sum_of_reward * self.gamma + rews
return self.moving_sum_of_reward
4.2.2 Main Training Loop¶
In [ ]:
env_id = params["env_id"]
exp_name = params["exp_name"]
seed = params["seed"]
run_name = f"{env_id}__{exp_name}__{seed}__{int(time.time())}"
envs = gym.vector.SyncVectorEnv(
[make_env(env_id) for i in range(params["num_envs"])],
)
In [ ]:
# Set up agent and model
Agent = PPOAgent(envs, use_int_rews=True).to(device)
optimizer = optim.Adam(
Agent.parameters(),
lr=params["learning_rate"],
eps=1e-5,
)
rnd_model = RNDModel().to(device)
combined_parameters = list(Agent.parameters()) + list(rnd_model.predictor.parameters())
optimizer = optim.Adam(
combined_parameters,
lr=params["learning_rate"],
eps=1e-5,
)
rew_runnning_mean_std = RunningMeanStd()
discounted_reward = MovingSumOfReward(params["int_gamma"])
In [ ]:
obs = torch.zeros((params["num_steps"], params["num_envs"]) + envs.single_observation_space.shape).to(device) # (128, 4,, 4, 84, 84)
actions = torch.zeros((params["num_steps"], params["num_envs"]) + envs.single_action_space.shape).to(device) # (128, 4)
logprobs = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
rewards = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
surprise_rewards = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
dones = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
ext_values = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
int_values = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
avg_returns = deque(maxlen=20)
In [ ]:
batch_size = int(params["num_envs"] * params["num_steps"]) # 4 * 128
minibatch_size = int(batch_size // params["num_minibatches"])
num_iterations = params["total_timesteps"] // batch_size # 20000000/(4*128) -> num iterations
global_step = 0
start_time = time.time()
next_obs = torch.Tensor(envs.reset()[0]).to(device)
next_done = torch.zeros(params["num_envs"]).to(device)
results_RND = {"global_step":[],
"return_value":[],
"intrinsic_reward":[]}
tracking_global_step = 0
for iteration in range(1, num_iterations + 1):
if params["anneal_lr"]:
updated_lr = (1.0 - (iteration - 1.0) / num_iterations) * params["learning_rate"]
optimizer.param_groups[0]["lr"] = updated_lr
# n-step rollouts
for step in range(0, params["num_steps"]):
global_step += 1 * params["num_envs"]
obs[step] = next_obs
dones[step] = next_done
with torch.no_grad():
action, logprob, _, value_ext, value_int = Agent.get_action_and_value(next_obs)
ext_values[step], int_values[step] = (
value_ext.flatten(),
value_int.flatten(),
)
actions[step] = action
logprobs[step] = logprob.flatten()
next_obs, reward, terminated, truncated, info = envs.step(action.cpu().numpy())
done = np.logical_or(terminated, truncated)
rewards[step] = torch.tensor(reward).to(device).view(-1)
next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
# Normalize obs for rnd
rnd_next_obs = next_obs
# Get the target F(O) and predict \hat(F)(O) value from rnd model
target_next_feature, predict_next_feature = rnd_model.target(rnd_next_obs), rnd_model.predictor(rnd_next_obs)
# Calculate the surprise reward
surprise_rewards[step] = ((target_next_feature - predict_next_feature).pow(2).sum(1) / 2).data
if "final_info" in info:
for info in info["final_info"]:
if info and "episode" in info:
print(
f"global_step={global_step}, episodic_return={info['episode']['r'][0]}, surprise_reward={np.mean(surprise_rewards[step].cpu().numpy())}"
)
if global_step - tracking_global_step > 2000:
return_eval = evaluate(params["env_id"], Agent, use_int_rews=True)
results_RND["global_step"].append(global_step)
results_RND["return_value"].append(return_eval)
tracking_global_step = global_step
# Calculate the discounted reward
surprise_reward_per_env = np.array(
[discounted_reward.update(reward_per_step) for reward_per_step in surprise_rewards.cpu().data.numpy().T]
)
mean, std, count = (
np.mean(surprise_reward_per_env),
np.std(surprise_reward_per_env),
len(surprise_reward_per_env),
)
rew_runnning_mean_std.update_from_moments(mean, std**2, count)
# Normalize the curiousity_rewards based on the running_mean_std
surprise_rewards /= np.sqrt(rew_runnning_mean_std.var)
# Calculate value if not done
with torch.no_grad():
next_value_ext, next_value_int = Agent.get_value(next_obs)
next_value_ext, next_value_int = next_value_ext.reshape(1, -1), next_value_int.reshape(1, -1) # -> get next state values external & internal
ext_advantages = torch.zeros_like(rewards, device=device)
int_advantages = torch.zeros_like(surprise_rewards, device=device)
ext_lastgaelam = 0
int_lastgaelam = 0
for t in reversed(range(params["num_steps"])):
if t == params["num_steps"] - 1:
ext_nextnonterminal = 1.0 - next_done
int_nextnonterminal = 1.0
ext_nextvalues = next_value_ext
int_nextvalues = next_value_int
else:
ext_nextnonterminal = 1.0 - dones[t + 1]
int_nextnonterminal = 1.0
ext_nextvalues = ext_values[t + 1]
int_nextvalues = int_values[t + 1]
ext_delta = rewards[t] + params["gamma"] * ext_nextvalues * ext_nextnonterminal - ext_values[t]
int_delta = surprise_rewards[t] + params["int_gamma"] * int_nextvalues * int_nextnonterminal - int_values[t]
ext_advantages[t] = ext_lastgaelam = (
ext_delta + params["gamma"] * params["gae_lambda"] * ext_nextnonterminal * ext_lastgaelam
)
int_advantages[t] = int_lastgaelam = (
int_delta + params["int_gamma"] * params["gae_lambda"] * int_nextnonterminal * int_lastgaelam
)
ext_returns = ext_advantages + ext_values
int_returns = int_advantages + int_values
# Collect batch data for optimization
b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
b_logprobs = logprobs.reshape(-1)
b_actions = actions.reshape(-1)
b_ext_advantages = ext_advantages.reshape(-1)
b_int_advantages = int_advantages.reshape(-1)
b_ext_returns = ext_returns.reshape(-1)
b_int_returns = int_returns.reshape(-1)
b_ext_values = ext_values.reshape(-1)
b_advantages = b_int_advantages * params["int_coef"] + b_ext_advantages * params["ext_coef"]
# Optimizing the policy and value network
b_inds = np.arange(batch_size)
rnd_next_obs = b_obs
clipfracs = []
for epoch in range(params["update_epochs"]):
np.random.shuffle(b_inds)
for start in range(0, batch_size, minibatch_size):
end = start + minibatch_size
mb_inds = b_inds[start:end]
# Forward MSE loss of the RND Model
predict_next_state_feature, target_next_state_feature = rnd_model(rnd_next_obs[mb_inds])
forward_loss = F.mse_loss(
predict_next_state_feature, target_next_state_feature.detach(), reduction="none"
).mean(-1)
mask = torch.rand(len(forward_loss), device=device)
mask = (mask < params["update_proportion"]).type(torch.FloatTensor).to(device)
forward_loss = (forward_loss * mask).sum() / torch.max(
mask.sum(), torch.tensor([1], device=device, dtype=torch.float32)
)
_, newlogprob, entropy, new_ext_values, new_int_values = Agent.get_action_and_value(
b_obs[mb_inds], b_actions.long()[mb_inds]
)
logratio = newlogprob - b_logprobs[mb_inds]
ratio = logratio.exp()
with torch.no_grad():
# calculate approx_kl http://joschu.net/blog/kl-approx.html
old_approx_kl = (-logratio).mean()
approx_kl = ((ratio - 1) - logratio).mean()
clipfracs += [((ratio - 1.0).abs() > params["clip_coef"]).float().mean().item()]
mb_advantages = b_advantages[mb_inds]
if params["norm_adv"]:
mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
# Policy loss
pg_loss1 = -mb_advantages * ratio
pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - params["clip_coef"], 1 + params["clip_coef"])
pg_loss = torch.max(pg_loss1, pg_loss2).mean()
# Value loss
new_ext_values, new_int_values = new_ext_values.view(-1), new_int_values.view(-1)
if params["clip_vloss"]:
ext_value_loss_unclipped = (new_ext_values - b_ext_returns[mb_inds]) ** 2
ext_v_clipped = b_ext_values[mb_inds] + torch.clamp(
new_ext_values - b_ext_values[mb_inds],
-params["clip_coef"],
params["clip_coef"],
)
ext_value_loss_clipped = (ext_v_clipped - b_ext_returns[mb_inds]) ** 2
ext_value_loss_max = torch.max(ext_value_loss_unclipped, ext_value_loss_clipped)
ext_value_loss = 0.5 * ext_value_loss_max.mean()
else:
ext_value_loss = 0.5 * ((new_ext_values - b_ext_returns[mb_inds]) ** 2).mean()
int_value_loss = 0.5 * ((new_int_values - b_int_returns[mb_inds]) ** 2).mean()
value_loss = ext_value_loss + int_value_loss
entropy_loss = entropy.mean()
loss = pg_loss - params["ent_coef"] * entropy_loss + value_loss * params["vf_coef"] + forward_loss
optimizer.zero_grad()
loss.backward()
if params["max_grad_norm"]:
nn.utils.clip_grad_norm_(
combined_parameters,
params["max_grad_norm"],
)
optimizer.step()
if params["target_kl"] is not None:
if approx_kl > params["target_kl"]:
break
print("SPS:", int(global_step / (time.time() - start_time)))
In [ ]:
envs.close()
In [ ]:
# torch.save(Agent, "pretrained_models/ppo_for_RND.pth")
# torch.save(rnd_model, "pretrained_models/rnd.pth")
In [ ]:
# # Load the saved PPO agent
# agent = torch.load("pretrained_models/ppo_for_RND.pth")
# # Load the saved ICM model
# icm = torch.load("pretrained_models/rnd.pth")
In [ ]:
# Extract data from results_RND
rnd_global_step = results_RND["global_step"]
rnd_return_value = results_RND["return_value"]
df_rnd = pd.DataFrame({'global_step': rnd_global_step, 'return_value': rnd_return_value})
# Save DataFrames to CSV files
df_rnd.to_csv('data/results_rnd.csv', index=False)
5. Curiosity-driven Exploration by Self-supervised Prediction¶
- In this section, we will test the Intrinsic Curiousity Motivation (ICM) algorithm on the BreakOut-v5 environment. 🕹️
- The result of this algorithm will be presented at the end of the notebook. 📝
5.1 Key Points¶
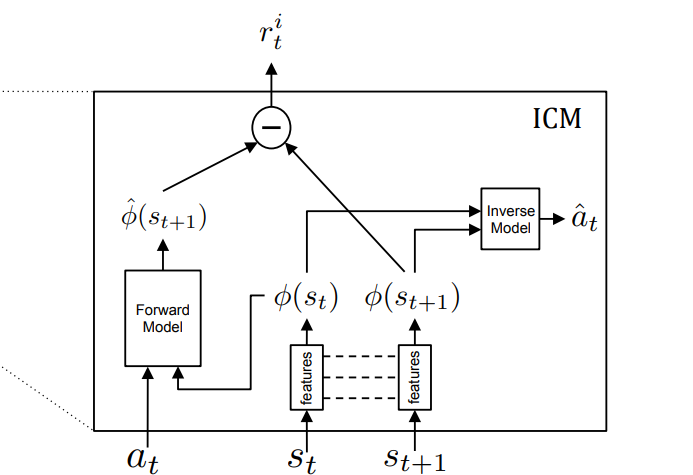
- The architecture is a network with two tasks, which we refer to as inverse prediction task and forward prediction task. The network, firstly, encodes the state $s_{t}$ and state $s_{t+1}$ into feature vectors $\phi(s_{t})$ and $\phi(s_{t+1})$. The network used the two encoded vectors as input to predict action $a_t$ in the inverse prediction task. It then used the result feature vectors $\phi(s_{t})$ and action $a_t$ as input to predict $\phi(s_{t+1})$.
- The loss for the inverse prediction task is a cross entropy loss between the action chosen by the architecture and the real action that the agent has taken. The loss for the forward prediction task is an MSE loss.
- Prediction error is expected to be higher in novel state (suprise state) that the agent is not familiar with.
- Reward and Observation Normalization.
5.2 Models¶
5.2.1 ICM Models¶
In [ ]:
class ICMModel(nn.Module):
def __init__(self, use_cuda=True):
super(ICMModel, self).__init__()
self.eta = 1.
self.device = device
self.feature = nn.Sequential(
layer_init(nn.Linear(state_space, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 64)),
nn.ReLU(),
layer_init(nn.Linear(64, 64), std=1.0),
)
self.inverse_net = nn.Sequential(
nn.Linear(64 * 2, 512),
nn.ReLU(),
nn.Linear(512, action_space)
)
self.residual = [nn.Sequential(
nn.Linear(action_space + 512, 512),
nn.LeakyReLU(),
nn.Linear(512, 512),
).to(self.device)] * 4
self.forward_net_1 = nn.Sequential(
nn.Linear(action_space + 64, 512),
nn.LeakyReLU()
)
self.forward_net_2 = nn.Sequential(
nn.Linear(action_space + 512, 64),
)
for p in self.modules():
if isinstance(p, nn.Linear):
init.kaiming_uniform_(p.weight, a=1.0)
p.bias.data.zero_()
def forward(self, inputs):
state, next_state, action = inputs
encode_state = self.feature(state)
encode_next_state = self.feature(next_state)
# get pred action
pred_action = torch.cat((encode_state, encode_next_state), 1)
pred_action = self.inverse_net(pred_action)
# ---------------------
# get pred next state
pred_next_state_feature_orig = torch.cat((encode_state, action), 1)
pred_next_state_feature_orig = self.forward_net_1(pred_next_state_feature_orig)
# residual
for i in range(2):
pred_next_state_feature = self.residual[i * 2](torch.cat((pred_next_state_feature_orig, action), 1))
pred_next_state_feature_orig = self.residual[i * 2 + 1](
torch.cat((pred_next_state_feature, action), 1)) + pred_next_state_feature_orig
pred_next_state_feature = self.forward_net_2(torch.cat((pred_next_state_feature_orig, action), 1))
real_next_state_feature = encode_next_state
return real_next_state_feature, pred_next_state_feature, pred_action
def compute_intrinsic_reward(self, state, next_state, action):
# Create 0 vector for the onehot encoded action
action_onehot = torch.zeros(len(action), action_space, device=self.device)
# Scatter the value as according to the value in action
action_onehot.scatter_(1, action.view(len(action), -1), 1)
real_next_state_feature, pred_next_state_feature, pred_action = self.forward([state, next_state, action_onehot])
intrinsic_reward = self.eta * F.mse_loss(real_next_state_feature, pred_next_state_feature, reduction='none').mean(-1)
return intrinsic_reward
def inference(self, states, next_states, actions):
action_onehot = torch.zeros(len(actions), action_space, device=self.device)
action_onehot.scatter_(1, actions.view(-1, 1).long(), 1)
real_next_state_feature, pred_next_state_feature, pred_action = self.forward([states, next_states, action_onehot])
return real_next_state_feature, pred_next_state_feature, pred_action
In [ ]:
class MovingSumOfReward:
def __init__(self, gamma):
self.moving_sum_of_reward = None
self.gamma = gamma
def update(self, rews):
if self.moving_sum_of_reward is None:
self.moving_sum_of_reward = rews
else:
self.moving_sum_of_reward = self.moving_sum_of_reward * self.gamma + rews
return self.moving_sum_of_reward
5.2.2 Main Training Loop¶
In [ ]:
env_id = params["env_id"]
exp_name = params["exp_name"]
seed = params["seed"]
run_name = f"{env_id}__{exp_name}__{seed}__{int(time.time())}"
envs = gym.vector.SyncVectorEnv(
[make_env(env_id) for i in range(params["num_envs"])],
)
In [ ]:
# Set up agent and model
icm = ICMModel().to(device)
Agent = PPOAgent(envs, use_int_rews=True).to(device)
combined_parameters = list(Agent.parameters() ) + list(icm.parameters())
optimizer = optim.Adam(
combined_parameters,
lr=params["learning_rate"],
eps=1e-5,
)
rew_runnning_mean_std = RunningMeanStd()
discounted_reward = MovingSumOfReward(params["int_gamma"])
In [ ]:
obs = torch.zeros((params["num_steps"]+1, params["num_envs"]) + envs.single_observation_space.shape).to(device) # (128, 4,, 4, 84, 84)
In [ ]:
batch_size = int(params["num_envs"] * params["num_steps"]) # 4 * 128
minibatch_size = int(batch_size // params["num_minibatches"])
num_iterations = params["total_timesteps"] // batch_size # 20000000/(4*128) -> num iterations
global_step = 0
tracking_global_step = 0
start_time = time.time()
next_obs = torch.Tensor(envs.reset()[0]).to(device)
next_done = torch.zeros(params["num_envs"]).to(device)
results_ICM = {"global_step":[],
"return_value":[],
"intrinsic_reward":[]}
for iteration in range(1, num_iterations + 1):
actions = torch.zeros((params["num_steps"], params["num_envs"]) + envs.single_action_space.shape).to(device)
logprobs = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
rewards = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
surprise_rewards = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
dones = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
ext_values = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
int_values = torch.zeros((params["num_steps"], params["num_envs"])).to(device)
# Calculate the new learning rate as according to the annealing rate if needed.
if params["anneal_lr"]:
updated_lr = (1.0 - (iteration - 1.0) / num_iterations) * params["learning_rate"]
optimizer.param_groups[0]["lr"] = updated_lr
for step in range(0, params["num_steps"]):
global_step += 1 * params["num_envs"]
obs[step] = next_obs
dones[step] = next_done
with torch.no_grad():
action, logprob, _, value_ext, value_int = Agent.get_action_and_value(obs[step])
ext_values[step], int_values[step] = (
value_ext.flatten(),
value_int.flatten(),
)
actions[step] = action
logprobs[step] = logprob.flatten()
next_obs, reward, terminated, truncated, info = envs.step(action.cpu().numpy())
done = np.logical_or(terminated, truncated)
rewards[step] = torch.tensor(reward).to(device).view(-1)
next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
# next_obs_b[step] = next_obs
icm_obs = obs[step]
icm_next_obs = next_obs
surprise_rewards[step] = icm.compute_intrinsic_reward(icm_obs.to(device), icm_next_obs.to(device), actions[step].long())
if "final_info" in info:
for info in info["final_info"]:
if info and "episode" in info:
print(
f"global_step={global_step}, episodic_return={info['episode']['r'][0]}, surprise_reward={np.mean(surprise_rewards[step].data.cpu().numpy())}"
)
if global_step - tracking_global_step > 2000:
return_eval = evaluate(params["env_id"], Agent, use_int_rews=True)
results_ICM["global_step"].append(global_step)
results_ICM["return_value"].append(return_eval)
tracking_global_step = global_step
obs[-1] = next_obs
# Calculate the discounted reward
surprise_reward_per_env = np.array(
[discounted_reward.update(reward_per_step) for reward_per_step in surprise_rewards.cpu().data.numpy().T]
)
mean, std, count = (
np.mean(surprise_reward_per_env),
np.std(surprise_reward_per_env),
len(surprise_reward_per_env),
)
rew_runnning_mean_std.update_from_moments(mean, std**2, count)
# Normalize the curiousity_rewards based on the running_mean_std
surprise_rewards /= np.sqrt(rew_runnning_mean_std.var)
# Calculate value if not done
with torch.no_grad():
next_value_ext, next_value_int = Agent.get_value(next_obs)
next_value_ext, next_value_int = next_value_ext.reshape(1, -1), next_value_int.reshape(1, -1)
ext_advantages = torch.zeros_like(rewards, device=device)
int_advantages = torch.zeros_like(surprise_rewards, device=device)
ext_lastgaelam = 0
int_lastgaelam = 0
for t in reversed(range(params["num_steps"])):
if t == params["num_steps"] - 1:
ext_nextnonterminal = 1.0 - next_done
int_nextnonterminal = 1.0
ext_nextvalues = next_value_ext
int_nextvalues = next_value_int
else:
ext_nextnonterminal = 1.0 - dones[t + 1]
int_nextnonterminal = 1.0
ext_nextvalues = ext_values[t + 1]
int_nextvalues = int_values[t + 1]
ext_delta = rewards[t] + params["gamma"] * ext_nextvalues * ext_nextnonterminal - ext_values[t]
int_delta = surprise_rewards[t] + params["int_gamma"] * int_nextvalues * int_nextnonterminal - int_values[t]
ext_advantages[t] = ext_lastgaelam = (
ext_delta + params["gamma"] * params["gae_lambda"] * ext_nextnonterminal * ext_lastgaelam
)
int_advantages[t] = int_lastgaelam = (
int_delta + params["int_gamma"] * params["gae_lambda"] * int_nextnonterminal * int_lastgaelam
)
ext_returns = ext_advantages + ext_values
int_returns = int_advantages + int_values
# Collect batch data for optimization
b_obs = obs[:-1].reshape((-1,) + envs.single_observation_space.shape)
b_next_obs = obs[1:].reshape((-1,) + envs.single_observation_space.shape)
b_logprobs = logprobs.reshape(-1)
b_actions = actions.reshape(-1)
b_ext_advantages = ext_advantages.reshape(-1)
b_int_advantages = int_advantages.reshape(-1)
b_ext_returns = ext_returns.reshape(-1)
b_int_returns = int_returns.reshape(-1)
b_ext_values = ext_values.reshape(-1)
b_advantages = b_int_advantages * params["int_coef"] + b_ext_advantages * params["ext_coef"]
# Optimizing the policy and value network
b_inds = np.arange(batch_size)
icm_obs = b_obs
icm_next_obs = b_next_obs
ce = nn.CrossEntropyLoss()
forward_mse = nn.MSELoss()
for epoch in range(params["update_epochs"]):
np.random.shuffle(b_inds)
for start in range(0, batch_size, minibatch_size):
end = start + minibatch_size
mb_inds = b_inds[start:end]
real_next_state_feature, pred_next_state_feature, pred_action = icm.inference(icm_obs[mb_inds].to(device), icm_next_obs[mb_inds].to(device), b_actions[mb_inds])
# Inverse cross entropy loss of the action prediction
inverse_loss = ce(
pred_action, b_actions[mb_inds].long())
# Forward MSE loss of the next state prediction
forward_loss = forward_mse(
pred_next_state_feature, real_next_state_feature.detach())
_, newlogprob, entropy, new_ext_values, new_int_values = Agent.get_action_and_value(
b_obs[mb_inds], b_actions.long()[mb_inds]
)
logratio = newlogprob - b_logprobs[mb_inds]
ratio = logratio.exp()
mb_advantages = b_advantages[mb_inds]
if params["norm_adv"]:
mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
# Policy loss
pg_loss1 = -mb_advantages * ratio
pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - params["clip_coef"], 1 + params["clip_coef"])
pg_loss = torch.max(pg_loss1, pg_loss2).mean()
# Value loss
new_ext_values, new_int_values = new_ext_values.view(-1), new_int_values.view(-1)
if params["clip_vloss"]:
ext_value_loss_unclipped = (new_ext_values - b_ext_returns[mb_inds]) ** 2
ext_v_clipped = b_ext_values[mb_inds] + torch.clamp(
new_ext_values - b_ext_values[mb_inds],
-params["clip_coef"],
params["clip_coef"],
)
ext_value_loss_clipped = (ext_v_clipped - b_ext_returns[mb_inds]) ** 2
ext_value_loss_max = torch.max(ext_value_loss_unclipped, ext_value_loss_clipped)
ext_value_loss = 0.5 * ext_value_loss_max.mean()
else:
ext_value_loss = 0.5 * ((new_ext_values - b_ext_returns[mb_inds]) ** 2).mean()
int_value_loss = 0.5 * ((new_int_values - b_int_returns[mb_inds]) ** 2).mean()
value_loss = ext_value_loss + int_value_loss
entropy_loss = entropy.mean()
loss = pg_loss - params["ent_coef"] * entropy_loss + value_loss * params["vf_coef"] + forward_loss + inverse_loss
optimizer.zero_grad()
loss.backward()
if params["max_grad_norm"]:
nn.utils.clip_grad_norm_(
combined_parameters,
params["max_grad_norm"],
)
optimizer.step()
print("SPS:", int(global_step / (time.time() - start_time)))
In [ ]:
envs.close()
In [ ]:
# torch.save(Agent, "pretrained_models/ppo_for_ICM.pth")
# torch.save(icm, "pretrained_models/icm.pth")
In [ ]:
# # Load the saved PPO agent
# agent = torch.load("pretrained_models/ppo_for_ICM.pth")
# # Load the saved ICM model
# icm = torch.load("pretrained_models/icm.pth")
In [ ]:
# Extract data from results_RND
icm_global_step = results_ICM["global_step"]
icm_return_value = results_ICM["return_value"]
icm_intrinsic_reward = results_ICM["intrinsic_reward"]
df_icm = pd.DataFrame({'global_step': icm_global_step, 'return_value': icm_return_value})
# Save DataFrames to CSV files
df_icm.to_csv('data/results_icm.csv', index=False)
6. Results Visualization¶
In [ ]:
df_simple_PPO = pd.read_csv('data/results_simple_ppo.csv')
df_rnd = pd.read_csv('data/results_rnd.csv')
df_icm = pd.read_csv('data/results_icm.csv')
In [ ]:
dfs = [df_simple_PPO, df_rnd, df_icm]
for df in dfs:
df["return_value_smoothed"] = df["return_value"].ewm(alpha=1-0.9).mean()
In [ ]:
# Plot the data
plt.plot(df_simple_PPO["global_step"], df_simple_PPO["return_value_smoothed"], label='Simple PPO')
plt.plot(df_rnd["global_step"], df_rnd["return_value_smoothed"], label='RND')
plt.plot(df_icm["global_step"], df_icm["return_value_smoothed"], label='ICM')
plt.xlabel('Timestep')
plt.ylabel('Return Value')
plt.title('Evaluate value of 1 run (evaluate over 50 episodes)')
plt.legend()
plt.show()

- When experimenting with the CartPole environment, we didn't observe significant differences between using simple PPO and incorporating exploration methods.
- We attribute this to the environment's simplicity, which renders exploration techniques unnecessary.
- However, if you explore the notebook "Memory_for_Surprise-driven_Exploration_Atari.ipynb", you will find the considerably more challenging environment where exploration techniques demonstrate significant impact.